针对目前移动机器人常采用单一传感器进行地图创建及定位,且所创建地图多为二维地图,存在探测不完整和不能详细描述空间情况等问题,提出了基于多传感器信息融合进行移动机器人三维地图创建及定位研究。该项目首先在制作的开源移动机器人平台上搭载XTION体感器、9自由度IMU模块和红外测距传感器等多种传感器,然后利用机器人操作系统(ROS)的分布式处理框架进行系统软件开发,使用多传感器信息融合等算法对信息进行处理来创建完整的三维地图。
图1 开源移动机器人平台
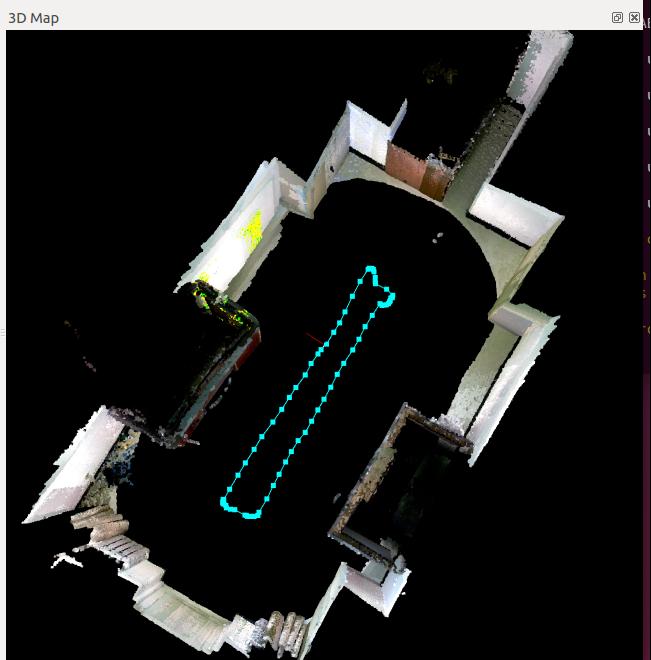
图2 三维地图
上一条:基于物联网的智能家居系统设计
下一条:高增益宽带放大器



 陕公网安备 61011602000474号
陕公网安备 61011602000474号

